TUTKAKUVAT
Meille ihmisille on luonnollista luokitella ja lajitella asioita, ja olemme siinä erittäin hyviä. Jos näemme vaikka koivun, kuusen ja männyn, voimme helposti puhua vain yleisesti puista. Mikäli kuulemme jostain uudesta puulajista, pystymme olettamaan sen yleiset piirteet. Luokittelu ja käsitteiden lajittelu auttaa meitä muistamaan ja ymmärtämään sekä suhteuttamaan eri asioita.
Vastaavasti voimme myös luokitella kiertoradalla satelliiteissa sijaitsevia sensoreita eri tavoin. Yksi tapa on jakaa ne aktiivisiin ja passiivisiin. Aktiiviset sensorit valaisevat itse tavalla tai toisella havaintokohteensa. Samaan tapaan kuin itse käyttäisit taskulamppua pimeällä verrattuna siihen, että samaa paikkaa tarkasteltaisiin vain päivänvalossa, kuten passiiviset sensorit tekevät.
Toinen tapa jakaa kiertoradalla sijaitsevia sensoreita on jakaa ne teknisen sensorin mukaan optisiin (toimivat kuten kamera) tai tutkalla toimiviin. Alla kuviossa 1 on esitetty, kuinka Sentinel-1 (aktiivinen, tutka) ja Sentinel-2 (passiivinen, optinen) satelliitit toimivat.
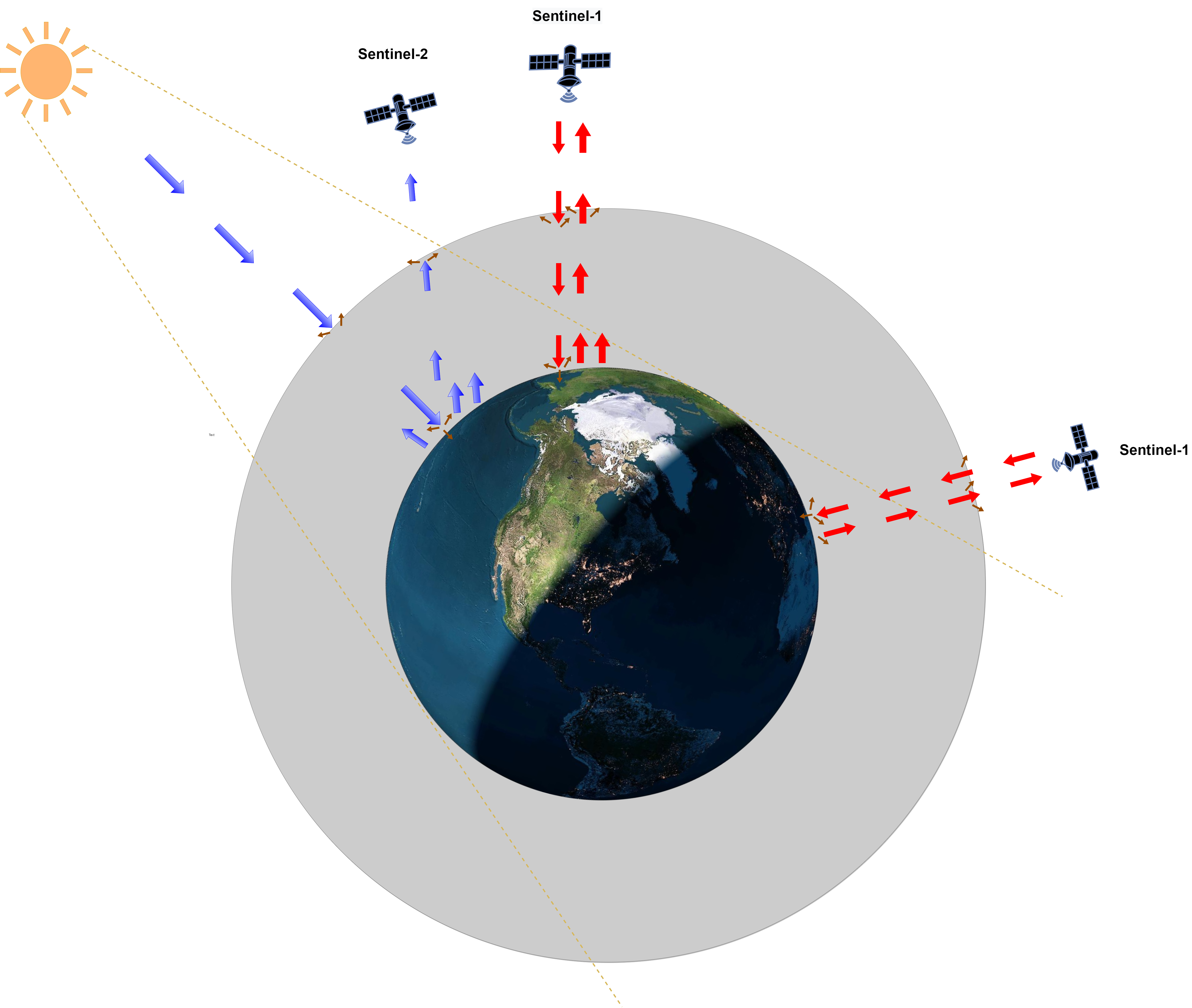
Kuvio 1. Esimerkki Sentinel-1- ja Sentinel-2 -satelliiteista tekemässä havaintoja. Sentinel-2 -satelliitit nojaavat auringon (ja joillain aallonpituuksilla maassa syntyvään) elektromagneettiseen säteilyyn havainnon luomiseksi. Sentinel-1 -satelliitti lähettää omia mikroaaltopulsseja havaintojensa luomiseksi. Kuvaa klikkaamalla aukeaa suurempi versio.
Tutkat eivät muodosta kuvia kuten kamera. Tutka mittaa etäisyyden tutkan paikasta johonkin, joka heijastaa säteen takaisin. Tutkajärjestelmä tietää ajanhetket, jolloin se lähetti säteen ja milloin kaiku palasi. Tiedämme, että säteen nopeus on valonnopeus. Kun tiedämme nopeuden sekä matka-ajan, pystymme laskemaan etäisyyden kohteeseen. Näin toimivat perinteiset tutkat. Jos tämä toistetaan nopeasti, mittaus mittaukselta, pystymme laskemaan kohteen nopeuden perustuen siihen, miten sen laskettu etäisyys muuttuu tietyssä ajassa. Tätä on havainnollistettu kuviossa 2.
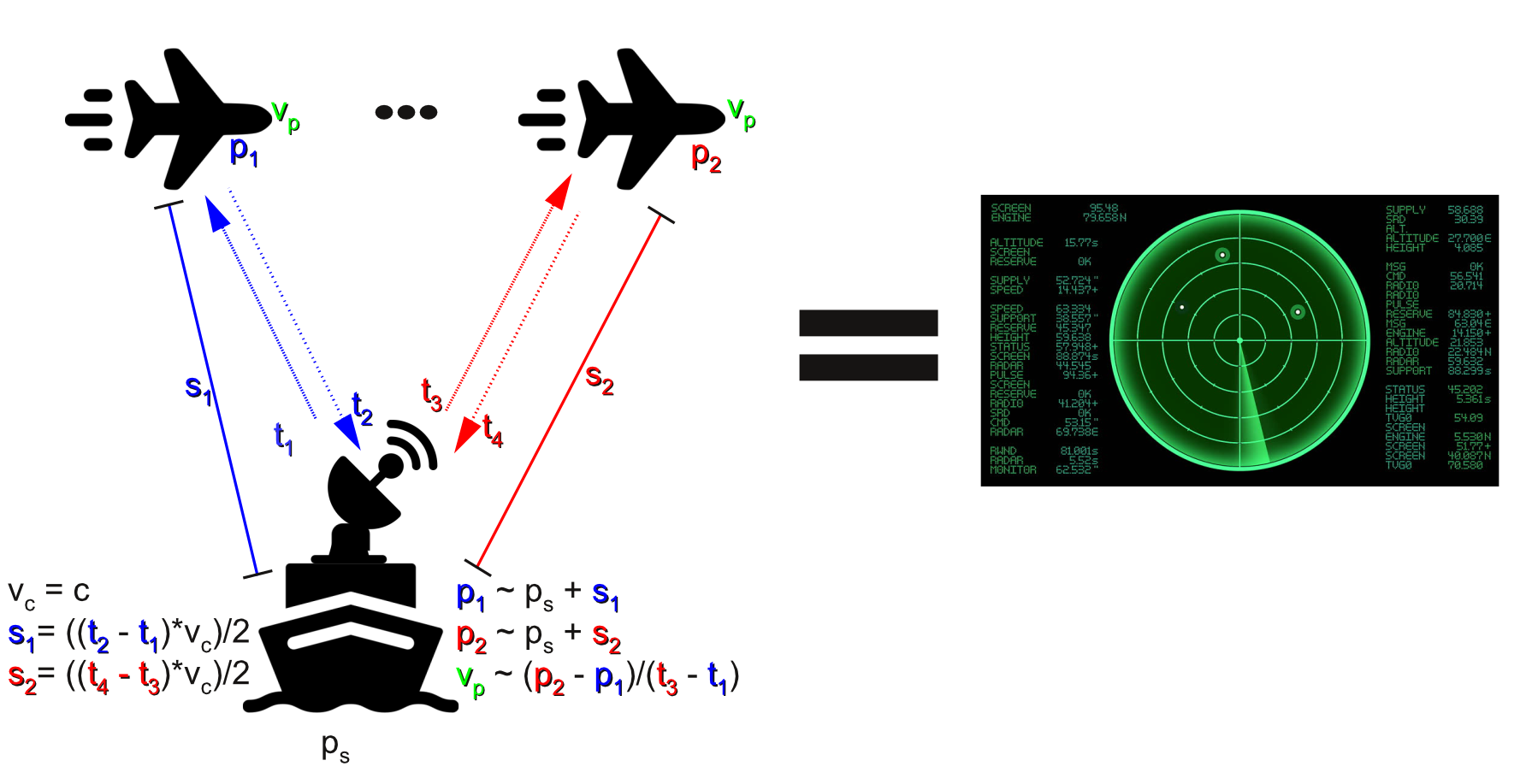
Kuvio 2. Havainnollistus perinteisen tutkan toimintaperiaatteesta. Tutkaruutu kuva Shutterstock. Ikonit Freepik. Kuvaa klikkaamalla aukeaa suurempi versio.
Tutka lähettää signaalinsa radiotaajuuksilla. Tämä tarkoittaa sitä, että lähetettävän signaalin aallonpituus on yleensä 30 Hz ja 110 GHz välissä tutkan käyttötarkoituksesta riippuen. Eri aallonpituudet sopivat eri käyttötarkoituksiin. Voit virkistää muistiasi aallonpituuksista aikaisemmassa artikkelissamme.
Tutkia on myös erilaisia. Jotkin niistä lähettävät pulsseja, kuten esimerkissämme, jotkut mittaavat jatkuvasti. Joissakin tutkajärjestelmissä signaalin lähetys on eri paikassa (tai antennissa) kuin vastaanotto. Tutkakorkeusmittarit mittaavat korkeutta, tutkasirontamittari taas erittäin tarkasti sitä, miten erilaiset asiat heijastavat radioaaltoja takaisin. Kuvatutkilla taas luodaan “kuvia” pohjautuen tutkamittauksiin.
Jos haluamme luoda tutkalla hieman kamerakuvaa vastaavan kuvan, kuvatusta tutkaprosessista tulee hieman monimutkaisempi. Emme käy lävitse yksityiskohtia, vaan pyrimme antamaan aiheesta yleisymmärryksen. On tärkeää kuitenkin muistaa tutkan luonne – vaikka lopputulos muistuttaakin valokuvaa alueesta, se on vain visualisaatio takaisin palautuneiden säteiden voimakkuudesta eri etäisyyksillä. Kuviossa 3 on kuvattu näihin etäisyysmittauksiin liittyviä virheitä.
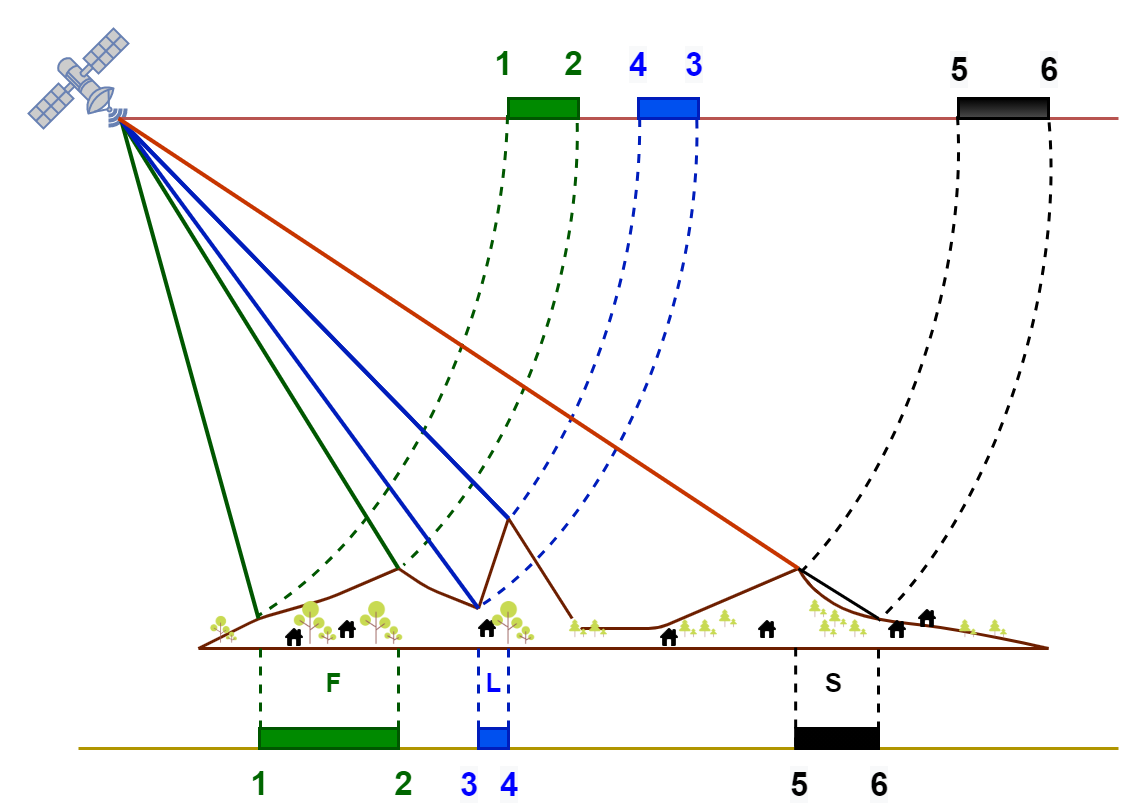
Kuvio 3. Etäisyysmittauksen virhelähteitä tutkakuvantamisessa. Kuvaa klikkaamalla aukeaa suurempi versio.
Kuvio 3 havainnollistaa tyypillisiä virheitä, joita syntyy mitattaessa ainoastaan etäisyyttä. Ylhäällä viivalla näkyy kuinka tutka “näkee” etäisyydet. Alhaalla olevalla viivalla näkyy se, kuinka etäisyydet ovat todellisuudessa. Pisteiden yksi ja kaksi välissä, väritettynä vihreällä on havainnollistettu lyhentämistä. Tutkapulssi heijastuu takaisin pisteestä kaksi nopeammin kuin jos se olisi matalammalla. Tästä johtuen tutka näkee vihreän alueen (kuvio 3, viiva ylhäällä) lyhyempänä kuin se on oikeasti (kuvio 3, viiva alhaalla). Pisteiden kolme ja neljä välillä (väritettynä sinisellä) tapahtuu efekti nimeltään “layover”. Se tarkoittaa, että tutka näkee pisteen neljä olevan lähempänä kuin pisteen kolme. Jos katsot viivojen pituuksia pisteistä kolme ja neljä tutkaan, huomaat tämän pitävän paikkansa. Valitettavasti se ei kuvaa aluetta oikein. Pisteiden kuusi ja viisi välissä on varjo. Tätä varjoa voidaan ajatella aivan vastaavasti kuin voimakasta varjoa arjessa: näemme vain mustaa, koska emme vastaanota heijastuksia alueelta. Emme tiedä mitä siellä on. Tutkakuvantamisessa on myös paljon muita virhelähteitä. Näitä virheitä korjataan erilaisilla laskennallisilla menetelmillä ja oikealla tiedolla alueesta, kuten esimerkiksi korkeustiedoilla.
Näin saamme siis yksiulotteisen kuvan alueesta. Yksiulotteinen “kuva” on siis oikeastaan vain jana, jossa eri voimakkuutta olevat heijastukset ovat järjestelty etäisyyden mukaan. Kuvat ovat kuitenkin kaksiulotteisia. Niillä on korkeus ja leveys. Synteettisen aukon tutkalla (lyh. SAR englanniksi) varustetulla satelliitilla tämä hoituu satelliitin itsensä liikkuessa. Tämä on havainnollistettu kuviossa 4. Satelliitissa oleva tutka lähettää tutkapulssit, vastaanottaa heijastukset ja luo äsken kerrotun kaltaisen yksiulotteisen kuvan alueesta. Satelliitin liikkuessa se lähettää uuden pulssin ja luo jälleen uuden kuvan. Se jatkaa tätä kunnes esiohjelmoitu määrä yksiulotteisia kuvia on saavutettu. Tämän jälkeen se yhdistää nämä yksiulotteiset kuvat kaksiulotteiseksi tutkakuvaksi. Todellisuudessa prosessi ei ole noin yksinkertainen, erityisesti tutkakuvan koostaminen, mutta periaate on kuvatun kaltainen.

Kuvio 4. Kuinka SAR-tutka koostaa mittauksensa eri ajanhetkiltä kuvaksi. Oikeasti yksittäisessä pikselissä saattaa yhdistyä useita mittauksia. Kuvaa klikkaamalla aukeaa suurempi versio.
Tutkaheijastukset antavat meille tietoa pinnalla olevien asioiden materiaalista ja koosta eri tavalla verrattuna näkyvään valoon, koska tutka-aaltojen aallonpituus on huomattavasti pidempi kuin näkyvän valon. Tutka-aaltojen aallonpituus verrattuna asioihin, joihin ne törmäävät maassa, voi olla mitä vain. Ne voivat olla lyhyempiä, pidempiä tai yhtä pitkiä. Tämä vaikuttaa siihen, kuinka paljon niitä heijastuu takaisin, mikä taas tekee itse heijasteiden ymmärtämisestä vaikeata.
Kuviossa 5 on kuvattuna erilaisia yksinkertaisempia vuorovaikutuksia tutka-aaltojen ja maassa olevien pintojen kanssa. Tasainen pinta toimii kuten peili ja heijastaa tutka-aallot toiseen suuntaan. Itse tutkalaitteeseen ei näitä palaudu. Peilityyni järvi on tästä hyvä esimerkki. Tuplaheijastuksessa taas yhdistyy kaksi tasaista pintaa ja takaisin heijastuva signaali on maksimaalinen. Esimerkkinä vaikkapa rakennukset katujen varsilla ja laivat aallottomassa vedessä. Kummassakin esimerkissä kohteet maassa ovat huomattavasti suurempia kuin tutka-aaltojen aallonpituus. Karkealla pinnalla taas pinnan muutokset ovat suurin piirtein samaa kokoluokkaa kuin tutkasäteiden aallonpituus. Tällaisessa tilanteessa tutkaenergia hajautuu moniin eri suuntiin ja vain pieni osa siitä palautuu itse tutkaan. Esimerkistä käy kuviteltu kivinen niitty Pohjanmaalla, missä on paljon erikokoista soraa. Metsä on taas huomattavasti monimutkaisempi ympäristö tutka-aaltojen heijastuksille. Elävä kerros koostuu monista erilaisista kohteista – rungoista, oksista ja lehdistä – jotka ovat suurin piirtein samaa kokoluokkaa tutkan aallonpituuden kanssa. Tästä signaalista heijastuu takaisin vain pieni osa. Tätä efektiä kasvattaa tämän kerroksen suuri vesipitoisuus.
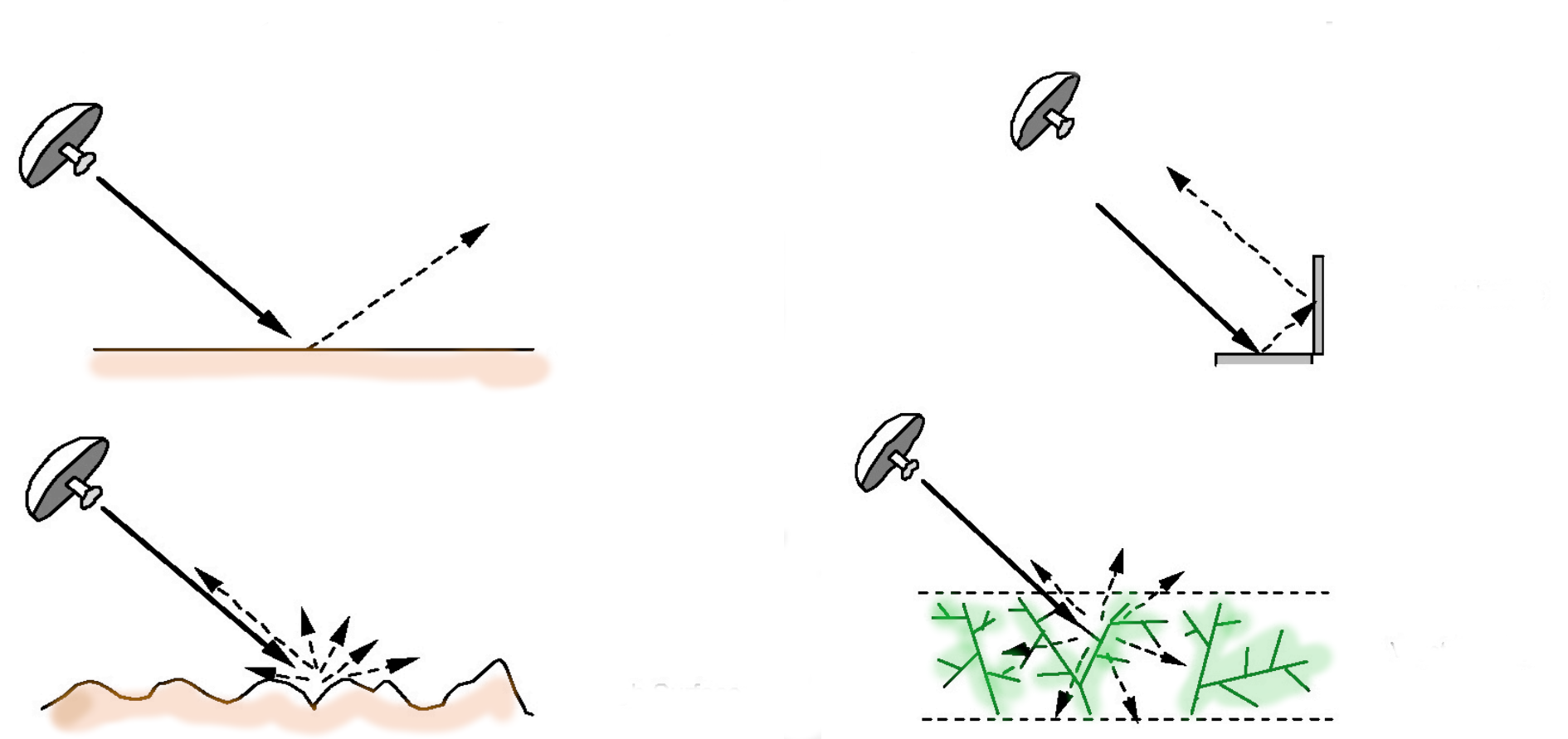
Kuvio 5. Erilaisia heijastumia. Ylhäällä vasemmalla: tasainen pinta. Alhaalla vasemmalla: karkea pinta. Oikealla ylhäällä: tuplaheijastus. Oikealla alhaalla: Elävä kerros. Kuva: NASA Applied Remote Sensing Training Program. Kuvaa klikkaamalla aukeaa suurempi versio.
Tutkan käyttämiseen kiertoradalta liittyy monia virhelähteitä sekä suuria eroja siinä, minkälaisia heijastuksia saamme takaisin. Osan näistä osaamme korjata tai tiedämme miten se pitää tulkita ja osaa voimme vain yrittää pienentää parhaamme mukaan. Tutkakuvantaminen on monimutkainen prosessi. Haluamme silti käyttää tutkakuvia useissa tilanteissa. Arvaatko, miksi? Eivätkö kameran kaltaiset sensorit tarjoaisi parempia, selkeämpiä kuvia, jotka olisivat myös helpommin ymmärrettävissä?
Tutkakuvat tarjoavat meille kuitenkin dataa monissa sellaisissa tilanteissa, joista emme normaalikuvien kaltaisilla lähteillä saisi irti juuri mitään. Esimerkiksi yö ja pimeys eivät vaikuta tutkakuviin. Jos muistat viime artikkelistamme, saimme yöajan kuvista hyvin vähän informaatiota, verrattuna päivällä otettuihin. Tutkakuvat ovat taas aivan samanlaisia päivällä ja yöllä. Lisäksi tutkalla näemme myös pilvien lävitse! Tämä on itseasiassa hyvin tärkeää Suomen kaltaisilla alueilla, joissa pilvet ovat hyvin usein havaintojen esteenä. Jos haluamme esimerkiksi kuvan joltain tietyltä päivältä, voi hyvin olla, että pilvisyyden vuoksi lähin käyttökelpoinen kuva on kuukausien päässä. Tämä korostuu aikasarja-analyysissä, jossa hyödynnetään paljon samasta kohteesta pitkän ajan kuluessa otettuja kuvia. Tutkakuvia on käytettävissä tasaisesti ja huomattavasti enemmän. Tärkein syy tutkakuvien käyttöön on kuitenkin se, että tutkakuvista saamamme informaatio on erilaista verrattuna optisiin kuviin, ja tuo lisäinformaatio johtaa parempaan ymmärrykseemme maailmasta.